Mapping in the Complex Plane
Contents
Mapping in the Complex Plane
The mapping of functions in the complex plane is conceptually simple, but will
lead us to a very powerful technique for determining system stability. In
addition it will give us insight into how to avoid instability. To introduce
the concept we will start with some simple examples. There are several videos
on this page - they merely support the written material, but are not absolutely
vital.
Mapping of Functions with a Single Zero
The simplest functions to map are those with a single zero. Several examples
follow.
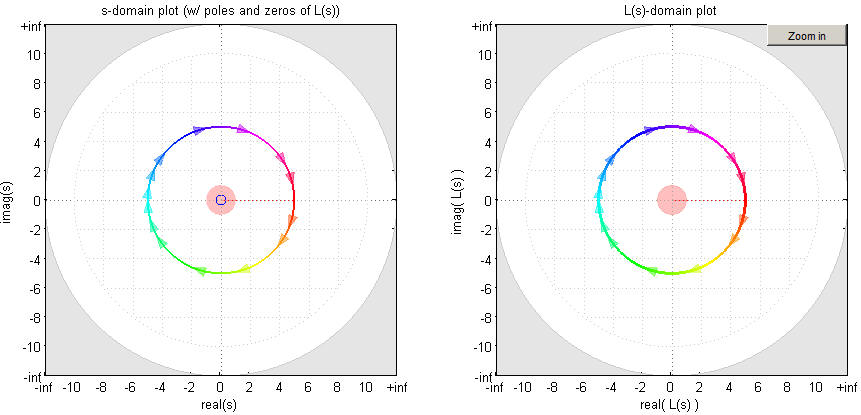
Example: Mapping with circle in "s", zero at the origin in "L(s)"
Consider the trivial function L(s)=s (we will deal with more complicated
functions later, this simple function allows us to introduce concepts associated
with mapping). We let the variable s traverse a circular path centered at the
origin with a radius of 5 moving in the clockwise direction (the left
side graph), In other words

We then plot L(s) on the right hand graph. This is
shown in the image below, followed soon thereafter by a
video that better demonstrates the mapping.
Notes about image above
There are several aspects about the image above that are important (many
of these come up later):
- The path in the "s" plane is shown at the left. It is a circle
of radius 5, centered at the origin and moving in a clockwise direction,
as indicated by the arrows.
- The arrows show the direction of motion, but the spacing of the arrows
is arbitrary.
- The colors of the two plots match, so that the portion of "s" that is
yellow is also yellow on "L(s)". This is obvious here, but becomes
a useful distinction in more complex plots to come.
- There is a pink circle centered on the zero in the "s" plane.
This shows the angle subtended between the zero and the path in s.
You can see the growth of this circle (in the clockwise direction)
in the video below.
- There is also a pink circle centered on the origin in the "L(s)" plane.
This shows the angle subtended between the origin and the path in s.
The color indicates the direction; pink indicates the clockwise direction.
If the direction had been counterclockwise it would be blue.
- Note that as the path in "s" encircles the zero one time in the counterclockwise
direction, the path in "L(s)" encircles the origin once in the same direction.
Video: Mapping with a single
zero
2½ minute video created with the Matlab script
NyquistGui)
Example: Mapping with circle in "s", zero at s=-4
If we now place a zero at s=-4 so that L(s)=s+4, the mapping is still very
straightforward. Every location in "s" simply maps to a location that
is 4 units to the right in "L(s)". The path in s remains as before.
(Note: this example is also considered as part of the
video above.)

Notes about image above
- The path in "s" is still a circle, as is the path in
"L(s)", but the path
is simply offset by 4 (since L(s)=s+4.
- Note that as the path in "s" encircles the zero one time in the clockwise
direction, the path in "L(s)" encircles the origin once in the same direction.
- As the path in "s" gets near the pole in "L(s)" (where the path has
a light blue color), the path in "L(s)" becomes the smallest (i.e., the closest
to the origin). This is because the term in the numerator, in this
case (s+4), is minimal when "s" is near the pole at -4. Also, when
the distance from the zero to the path in "s" is maximal (red), so is the
distance from L(s) to the origin.
Example: Mapping with circle in "s", zero at s=-6
If we now place a zero at s=-6 so that L(s)=s+6, the mapping is still very
straightforward. Every location in "s" simply maps to a location that
is 4 units to the right in "L(s)." The path in s remains as before.
(Note: this example is also considered as part of the
video above.)

Notes about image above
- The path in "s" is still a circle, as is the path in
"L(s)", but the path
is simply offset by 4 (since L(s)=s+4.
- Note that as the path in "s" no longer encircles the zero, and the path
in "L(s)" no longer encircles the origin.
Comments about mapping with a zero in "L(s)"
There are three important, and general, statements we can now make about mapping
from "s" to "L(s)" when there is a zero in "L(s)":
- If the path in "s" is in the clockwise direction, then the path in "L(s)"
is in the clockwise direction.
- As the path in "s" gets close to the zero in "L(s)" the path in "L(s)" goes
to its smallest value.
- If the path in "s" encircles the pole of "L(s)," then the path
in "L(s)" encircles
the origin once in the same direction.
Mapping of functions with a single pole is not much more difficult than mapping
with a single zero. There are two important facts about encirclements of
poles that can be shown by considering L(s) with a single pole at the origin,
and the path in "s" being a clockwise circle of radius 'r' around the origin:
- The first characteristic to be realized is that as the path in "s" comes close to a pole, the path in
"L(s)" gets large

Clearly as the radius of the
encirclement, r, becomes small, the magnitude of L(s) becomes large.
- The second characteristic is that the path in "L(s)" is in the opposite
direction of the path in "s." In this example, the path in "s" is
clockwise, so the path in "L(s)" is counterclockwise.

The mapping around various functions, L(s), with a single
poles are shown in the diagrams in the examples below, followed by a video that
shows several functions. Each example in the video is also included in the
examples that follow. It is useful to read the examples before viewing the
video.
Example: Mapping with circle in "s", pole at origin
If we choose L(s) such that it has a pole at the origin,

(note: the constant multiplier makes the plots looks nicer,
but isn't necessary for the mathematics to work)
and we let s follow the same path as before
We get

Because the ejθ was originally in the
denominator, its sign is changed when it moves to the numerator. In other
words, the path in "L(s)" is a circle of radius 2 that encircles the origin once
in the clockwise direction.

Notes about image above
- The path in the "s" plane is shown at the left. It is a circle
of radius 5, centered at the origin and moving in a clockwise direction.
- There is a blue circle centered on the pole in the "s" plane (a pink
circle will be used for zeros, as in the previous angles). This shows
the angle subtended between the pole and the path in s. You can see
the growth of this circle in the video below.
- There is a grey circle centered on the origin in the "L(s)" plane.
This shows the angle subtended between the origin and the path in s.
- Note that as the path in "s" encircles the pole one time in the clockwise
direction, the path in "L(s)" encircles the origin once in the opposite
(counterclockwise) direction.
Example: Mapping with circle in "s", pole at s=-4
If we now place a pole at s=-4 so that

Note: this example is also considered as part of the video
above.)
The path in s remains as before, but the path in "L(s)" has
changed. The center and extent of the path in "L(s)" have both changed.
(note: if you can show that the path in "L(s)" is also
a circle and derive equations for the radius and center, I'll include it here,
with an acknowledgement for the first person who sent it to me)

Notes about image above
- The path in "s" still encircles the pole in a clockwise direction, and
the path in "L(s)" still encircles the origin in a counterclockwise (opposite)
direction.
- As the path in "s" gets near the pole in "L(s)" (where the path has
a light blue color), the path in "L(s)" becomes the largest (i.e., the farthest
from the origin). This is because the term in the denominator, in
this case (s+4), is minimal when "s" is near the pole at -4. Also,
when the distance from the pole to the path in "s" is maximal (red), the
distance from L(s) to the origin is minimal
Example: Mapping with circle in "s", pole at s=-6
If we now place a pole at s=-6 so that

Note: this example is also considered as part of the video
above.)
The path in s remains as before, but the path in "L(s)" has
changed. The center and extent of the path in "L(s)" have both changed.

Notes about image above
- Note that as the path in "s" no longer encircles the pole in a clockwise
direction, and the path in "L(s)" no longer encircles the origin.
Example: Mapping with circle in "s", pole at s=-4.8
If we now place a pole at s=-4.8 so that

Note: this example is also considered as part of the video
above.)
The path in s remains as before, but the path in "L(s)" has
changed. The center and extent of the path in "L(s)" have both changed.
The shape
(note: if you can show that the path in "L(s)" is also
a circle and derive equations for the radius and center, I'll include it here,
with an acknowledgement for the first one to send it to me)

Notes about image above
- Note that as the path in "s" encircles the pole in a clockwise direction,
and the path in "L(s)" still encircles the origin in a counterclockwise direction.
- As the path in "s" comes very close to the pole in "L(s)" (where the
paths are light blue), the path in "L(s)" becomes very large. In these
diagrams this is shown as going towards infinity. In these plots,
anything with a radius of more than twelve is truncated and shown at infinity.
Video: Mapping with a
single pole
(2½ minute video created with the Matlab script
NyquistGui)
Comments about mapping with a pole in "L(s)"
There are thee important, and general, statements we can now make about mapping
from "s" to "L(s)" when there is a pole in "L(s)":
- If the path in "s" is in the clockwise direction, then the path in "L(s)"
is in the counterclockwise direction.
- As the path in "s" gets close to the pole in "L(s)" the path in "L(s)" goes
to its largest value.
- If the path in "s" encircles the pole of "L(s)," then the path
in "L(s)" encircles
the origin once in the opposite direction.
Mapping with multiple poles and/or zeros
If you understand the concept of mapping of functions with individual poles and
zeros, it is not much harder to understand mapping of functions with multiple poles
and zeros. A few examples will illustrate this. You should read
through the first example carefully, it has a lot of important information.
Example: L(s) has two poles, one zero; all are encircled
Consider mapping of the transfer function

where s follows a clockwise circular path of radius 5 around
the origin , as before.
To get an idea of what the mapping will look like, let's express the function
in polar notation.

At this point we are mostly interested in the angle of L(s),
so lets examine it more closely.

Recall that, in general, the angle

is
determined by drawing a line from s0 to s, and finding the angle
between that line and the horizontal (described
here). So if we let s0=-2, then the angle

would be determined by drawing a line from s=-2 to s and
finding the angle to the horizontal. This is shown in the diagram
below on the left for angles between the location s=-5j to the zero at -2,
and the poles at -1 and -3.

Since the angle of L(s) is given by

then this is the angle shown in the image above on the
right. Since we know the first term in the angle of L(s) goes from 0→-2*π,
and we subtract the other two terms, then the angle of L(s) must
go from 0→2*π, that is it encircles the origin once in the counterclockwise
direction. This can be seen in the image below, and in the
video that follows.

Notes about image above
- The path in "s" encircles the poles and zero in the clockwise direction.
- The angle between the path and the zero is shown in red, and the angle
between the path and the pole is shown in blue. The path in "L(s)",
which is shown in gray, is the sum of the angles from the zeros (red) minus
the angles from the poles (blue). This is more obvious in
the video.
- If a path in "s" encircles Z zeros and P poles of L(s) in the
clockwise direction, then the path in "L(s)" encircles the origin N=Z-P
times in the clockwise direction. In this case Z=1, P=2 so N=-1,
and we have one encirclement of the origin in "L(s)" in the
counterclockwise direction.
Aside: Magnitude of L(s)
The magnitude of L(s) is given by

This means that if s is very close to a zero (i.e.,
near s=-2) that the magnitude of L(s) becomes very small, and if s is
very close to a pole (i.e., near s=-1 or s=-3) that the magnitude of
L(s) becomes very large.
Key Concept: Magnitude and phase of L(s)
The phase of L(s) is simply the sum of the angles from the zeros of L(s)
to s, minus the angles from the poles of L(s) to s.
The magnitude of L(s) is small near zeros of L(s) and large near poles of
L(s).
Example: L(s) has two poles, one zero, one pole; one zero is encircled
Now if we change the transfer function to

then the path in s encircles the zero, but only one of the
poles.

Notes about image above
- If a path in "s" encircles Z zeros and P poles of L(s) in the
clockwise direction, then the path in "L(s)" encircles the origin N=Z-P
times in the clockwise direction. In this case Z=1, P=1 so N=0,
and we have no encirclements of the origin in "L(s)".
Example: L(s) has two poles, one zero; one zero is encircled
Now if

then the path in "s" encircles only the zero

Notes about image above
- If a path in "s" encircles Z zeros and P poles of L(s) in the
clockwise direction, then the path in "L(s)" encircles the origin N=Z-P
times in the clockwise direction. In this case Z=1, P=0 so N=1,
and we have one encirclement of the origin in "L(s)" in the clockwise
direction.
Example: L(s) has two poles, one zero; two poles are encircled
Now if

then the path in "s" encircles only the zero

Notes about image above
- If a path in "s" encircles Z zeros and P poles of L(s) in the
clockwise direction, then the path in "L(s)" encircles the origin N=Z-P
times in the clockwise direction. In this case Z=0, P=2 so N=-2,
and we have two encirclements of the origin in "L(s)" in the clockwise
direction.
- You can tell there are two encirclements because the circle in
"L(s)"
is twice as dark. This is more clear in
the video.
Example: L(s) has two complex conjugate poles encircled by s
Consider

Poles at -2±4j which are inside a circle with radius 5.

Notes about image above
- If a path in "s" encircles Z zeros and P poles of L(s) in the
clockwise direction, then the path in "L(s)" encircles the origin N=Z-P
times in the clockwise direction. In this case Z=0, P=2 so N=-2,
and we have two encirclements of the origin in "L(s)" in the clockwise
direction.
Example: L(s) has two complex conjugate poles not encircled by s
Consider

Poles at -4±4j, which are outside a circle of radius 5.

Notes about image above
- If a path in "s" encircles Z zeros and P poles of L(s) in the
clockwise direction, then the path in "L(s)" encircles the origin N=Z-P
times in the clockwise direction. In this case Z=0, P=0 so N=0 and
we have no encirclements of the origin in "L(s)".
Video: Mapping with a multiple
poles and zeros
(3½ minute video created with the Matlab script
NyquistGui)
Nothing that we have done so far depends on the fact that the path in "s" be
circular, which is important to the development of the Nyquist stability criterion
on the next web page. Two examples below (and a video) demonstrate this.
In the first example, immediately below, the path in "s" encircles a zero in the clockwise direction,
and the path in "L(s)" encircles the origin in the same direction.
In this first example L(s)=s, i.e., there is a zero at the origin.

In the second example, below, the path in "s" encircles a pole in the
clockwise direction, and the path in "L(s)" encircles the origin in the opposite
direction, Though the path is a very different shape. Note also that where
the distance from the path in "s" to the pole is minimal (i.e., where the path is
light blue), then the distance of path in "L(s)" to the origin is maximal
(and where the distance in "s" is maximal (where the path is red), the distance in "L(s)" is minimal).
In this example L(s)=10/(s+6), i.e., there is a pole at s=-6.

Video: Mapping with a multiple
poles and zeros
(2 minute video created with the Matlab script
NyquistGui))
Key Concept: Mapping from "s" to "L(s)"
The key points to keep in mind as you move to the next page:
- If a path in "s" encircles a zero of L(s) in the clockwise
direction, then this contributes 360° in the clockwise direction to
the path in "L(s)" as it moves around the origin.
- If a path in "s" encircles a pole of L(s) in the clockwise
direction, then this contributes 360° in the counter clockwise
direction to the path in "L(s)" as it moves around the origin.
- If a path in "s" encircles Z zeros and P poles of L(s) in the
clockwise direction, then the path in "L(s)" encircles the origin N=Z-P
times in the clockwise direction. If N is negative, this
corresponds to encirclements in the counterclockwise direction.
- The path in "s" need not be circular.
After reading through the material above, the question arises "So what?".
What we have done here is introduce a technique that gives use information about
the number of poles and zeros in a closed contour. To determine the
stability of a system, we want to determine if a system's transfer function has
any of poles in the right half plane. With just a little more work, we can
define our contour in "s" as the entire right half plane - then we can use this
to determine if there are any poles in the right half plane.
References
Replace